Advanced machine learning
From AlphaGo to AlphaZero
Alex Avdiushenko
February 25, 2025
RL recap
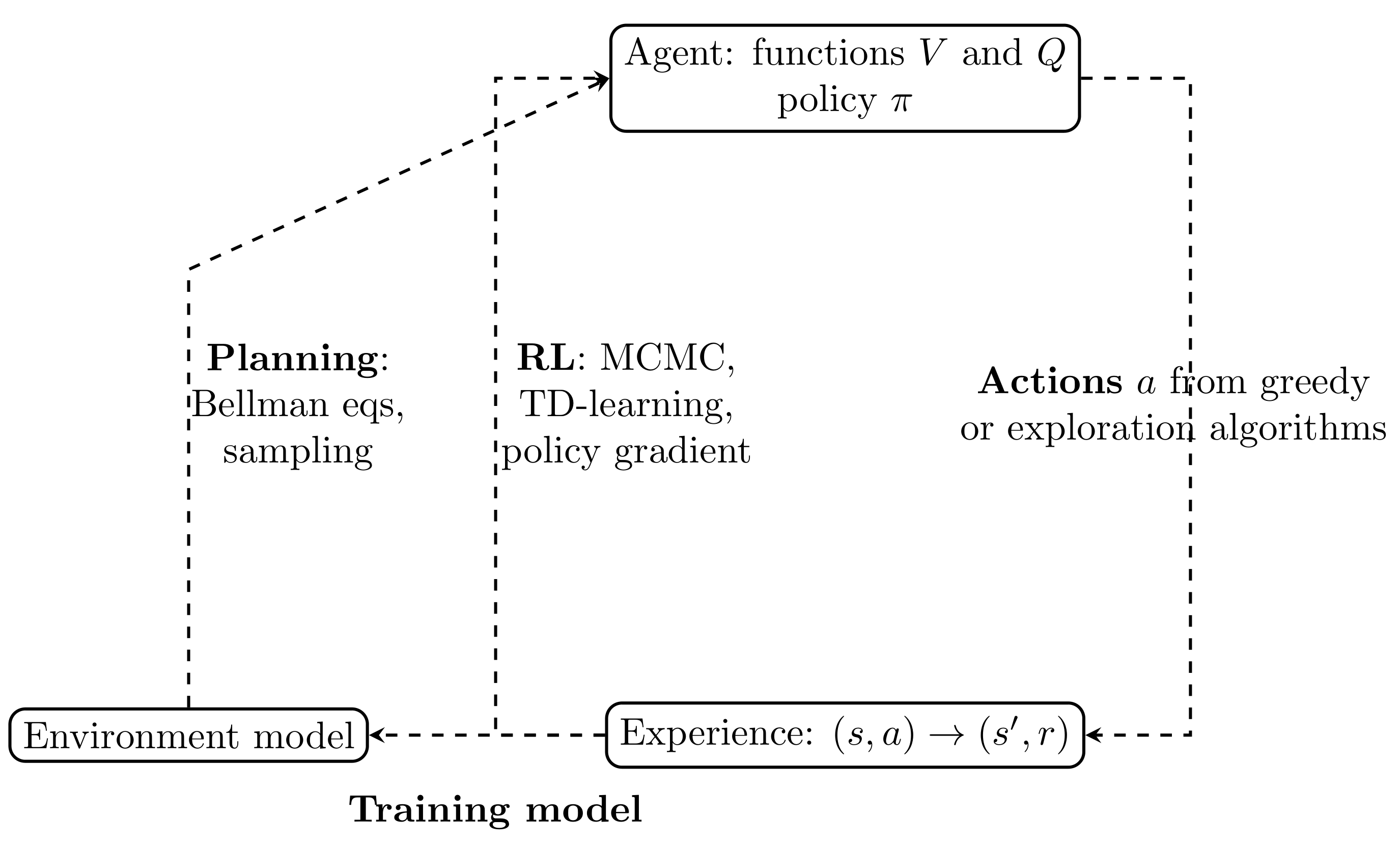
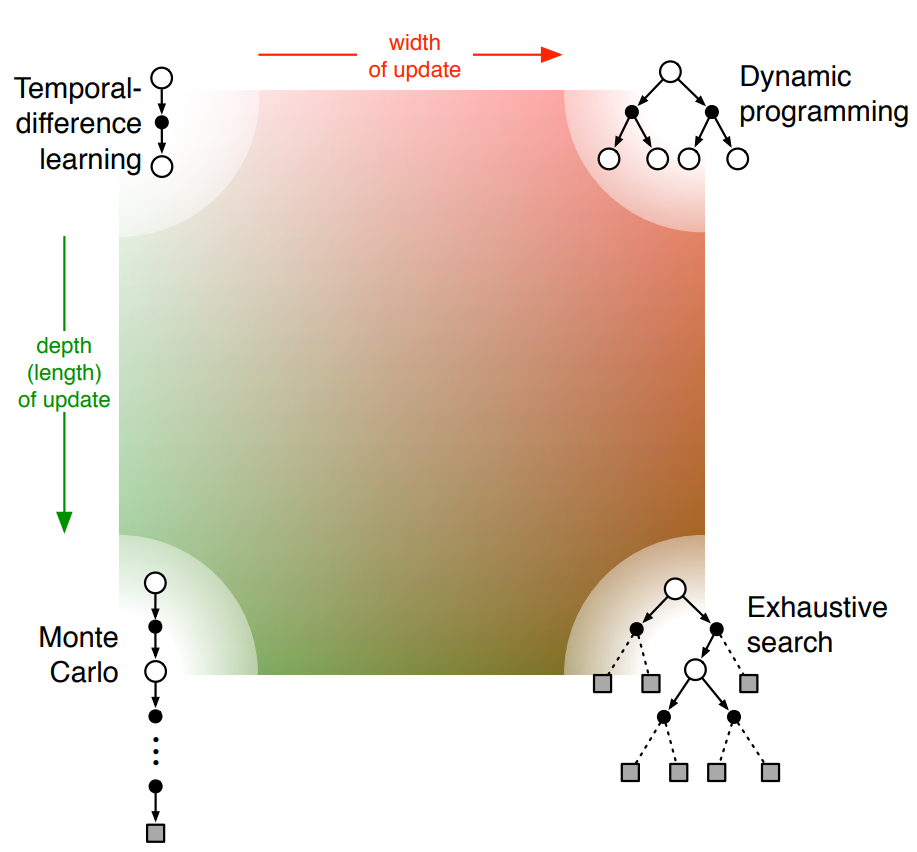
Source: BartoSutton.pdf
Policy gradient
We are trying to train just policy
$$\pi(a|s, \theta) = Pr[a_t = a| s_t = s]$$- We can train stochastic policies, where $\pi(a|s) \neq 0,1$
- We even can train raw scores only, applying Softmax for moves probabilities
Policy gradient theorem
Probabilities $Pr_\pi[s]$ are very hard to calculate, but we can just play using policy $\pi,$ and this gives us correct samples from this distribution
The REINFORCE algorithm is a policy-based method used in reinforcement learning. Unlike value-based methods, which aim to learn a value function by interaction with the environment, REINFORCE learns a stochastic policy directly.
$${\nabla_\theta J(\theta) \propto \sum\limits_s Pr_\pi[s] \sum\limits_a Q_\pi(s,a) \nabla_\theta \pi(a|s)} = \\ \quad = \mathbb{E}_{\pi} \left[ \sum\limits_a Q_\pi(s_t, a) \nabla_\theta \pi(a|s_t, \theta)\right]$$So the SGD updates are
$$\theta_{t+1} = \theta_{t} + \alpha \sum\limits_a \hat Q_\pi(s_t, a, \theta) \nabla_\theta \pi(a|s_t, \theta),$$where $\hat Q_\pi(s_t,a,\theta)$ is some learned approximation of the action-value function $Q$
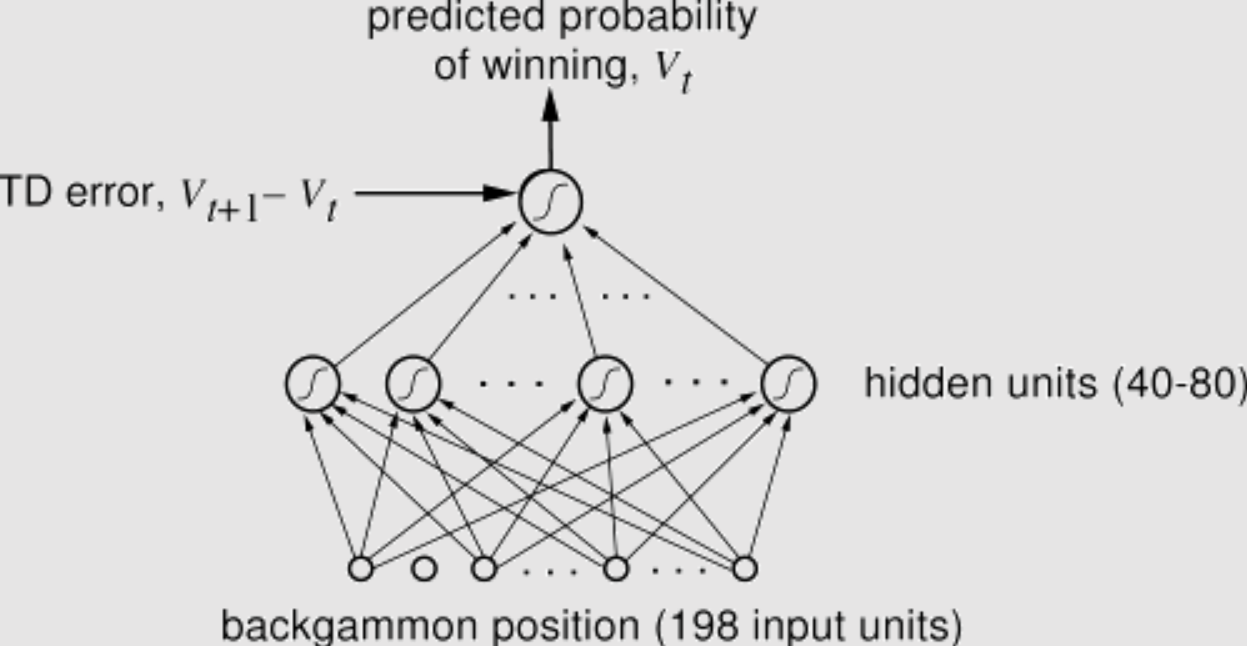
TD-Gammon (1992)
TD-Gammon is a computer gammon program that uses artificial intelligence and machine learning techniques to play the game at a highly competitive level. Developed by Gerald Tesauro from IBM.

Game Go: Basic Rules
History of Programs Playing Go
1960-s: Beginnings
- The first attempts to program a computer to play Go began in the 1960s
- The earliest Go programs could only play on smaller 9x9 or 13x13 boards and demonstrated limited capabilities due to the complexity of the game and technological constraints. 1968: Albert Zobrist
1980-1990-s: Incremental Improvements
- Throughout the 80s and 90s, Go programs gradually improved with advancements in computing power and AI algorithms
- However, they were still far from matching the skills of human players. Goliath, Go Intellect, Handtalk, Goemate
The power of computer Go programs
- 1997: Janice Kim (1p) won HandTalk program with a 25-stone handicap
- In the same year HandTalk program won 11-13 year old amateur 2-6 dans with 11-stone handicap
- 2001: Many Faces program won Insei (1p) on a 25-stone handicap
- At the 2010 European Go Congress MogoTW played 19x19 Go against Catalin Taranu (5p). MogoTW received a 7-stone handicap and won
- We know that DeepBlue defeated Garry Kasparov in 1997
What is the problem? Why is Go harder than Chess for computer?
Schematic tree of possible moves in Go
Why is Go really hard for computer?
- Huge branching factor
- Chess: there are 30–40 possibilities, and lots of them are obviously weak
- Go: there are about 250 possibilities, and about 100 from them are "reasonable"
- Hard to evaluate current position
- Chess: one can count pieces material and there are simple heuristics
- Go: it is really challenging even to understand who wins in the final position
Let's have a break!
2000-s: Monte-Carlo Tree Search
- In the 2000s, Monte Carlo Tree Search (MCTS) algorithms were introduced, resulting in significant improvements in the performance of Go programs
- We launch random simulations from the current position, observe which branches yield more wins, and then repeat the process
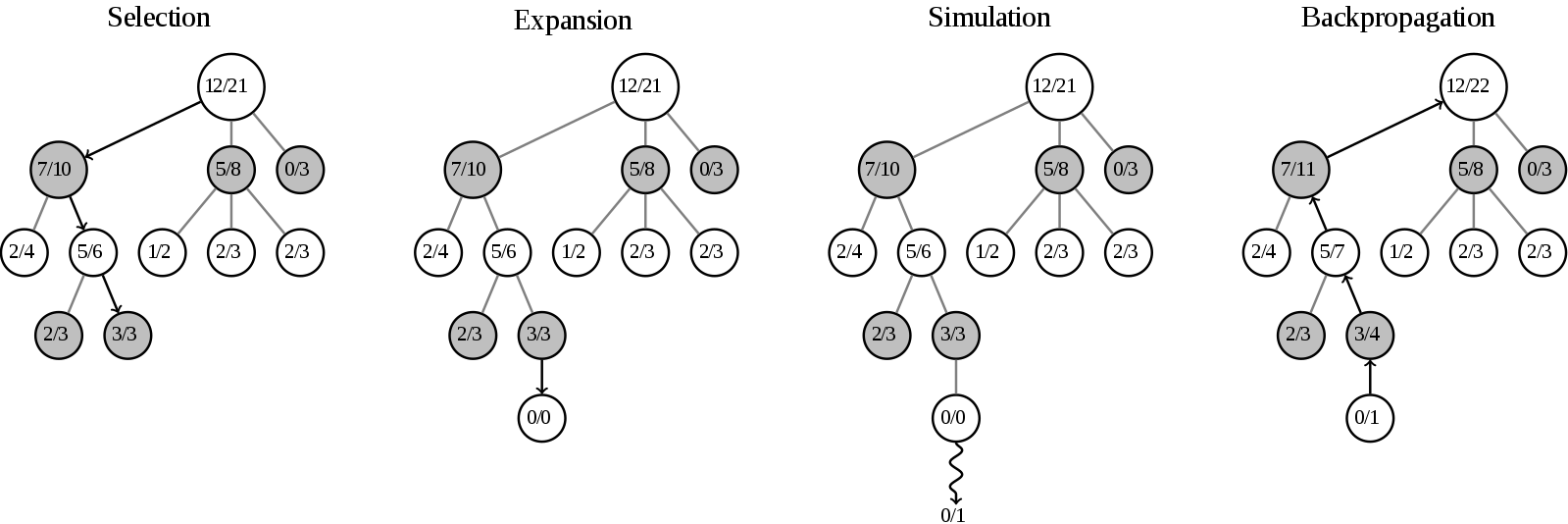
Monte Carlo Tree Search — UCB1
The main part of MCTS is the formula for selection of the next node. The UCB1 formula looks like this (the same as in multi-armed bandits):
$$ UCB1 = \frac{w_i}{n_i} + c \sqrt{\frac{\ln t}{n_i}} $$where:
- $w_i$ is the number of wins
- $n_i$ is the count of simulations for the node associated with action $i$
- $c$ is the parameter, by default $c=\sqrt{2}$
- $t = \sum\limits_i n_i$ is the total count of simulations for the parent node
The algorithm prefers actions with higher estimated rewards and higher uncertainties.
AlphaGo vs. Lee Sedol
9-15 March 2016Forecast was 1 : 4
Result was 4 : 1
History of AlphaGo
- AlphaGo is a computer program developed by Google DeepMind in 2014-2015: David Silver, Aja Huang etc.
- October 2015: AlphaGo plays its first match against the reigning three-time European Go champion, Fan Hui (2p), and wins 5:0. This is the first time a computer Go program has beaten a human professional player without handicaps on a full-sized 19x19 board.
- Paper in Nature "Mastering the game of Go with deep neural networks and tree search"
- March 2016: AlphaGo plays a five-game match against Lee Sedol, one of the world's top Go players, and wins 4:1
- May 2017: AlphaGo plays a three-game match against Ke Jie, the world No.1 ranked player at the time, and wins 3:0
The development of AlphaGo was a significant achievement in the field of Artificial Intelligence.
What is inside AlphaGo?
-
Supervised learning (SL) policy network for next move prediction:
- 13-layers CNN for features extraction from the board
- 30 billion positions from human expert games
- Moves probability distribution as output: $p_\sigma(a \mid s)$
- Accuracy reaches 57%, which is very high
- Also train fast and worse strategy $p_\pi$ (accuracy is 24%, but inference time is much less: 3 millisecond $\to$ 2 nanosecond)
- SL policy network predicts the next move
- RL policy network improves SL using reinforcement learning:
- the same structure of 13-layers CNN
- initialize with SL policy network
- self plays with one of the previous iterations of RL policy
- new weights maximize the probability of winning
- RL policy wins 80% games versus SL and 85% versus Pachi (one of the best MCTS programs)
- and this is without any MCTS-counting, due to only the strong moves' prediction!
- SL policy network predicts the next move
- RL policy network improves SL using reinforcement learning
- Also, they train function $V_\theta(s)$ for state evaluation:
- the same structure of 13-layers CNN, but now output is the probability of winning
- cannot train on the human expert's games only because of overfitting
- so they used self-play games from the RL policy network
- as a result, they got a great tool for position evaluation, which is 15K times faster than MCTS + RL
- SL policy network predicts the next move
- RL policy network improves SL using reinforcement learning
- Function $V_\theta(s)$ for state evaluation
- Eventually we can use MCTS counting:
- build an MCTS-like tree
- apriori probabilities initialize as $p_\sigma(a \mid s)$ from SL policy
- in each node of a tree for state evaluation we use $V_\theta(s)$, combined with the random rollout of self-played fast strategy $p_\pi$
- it is interesting that SL policy works better for tree building, but for training function $V_\theta(s)$ is better use stronger RL policy
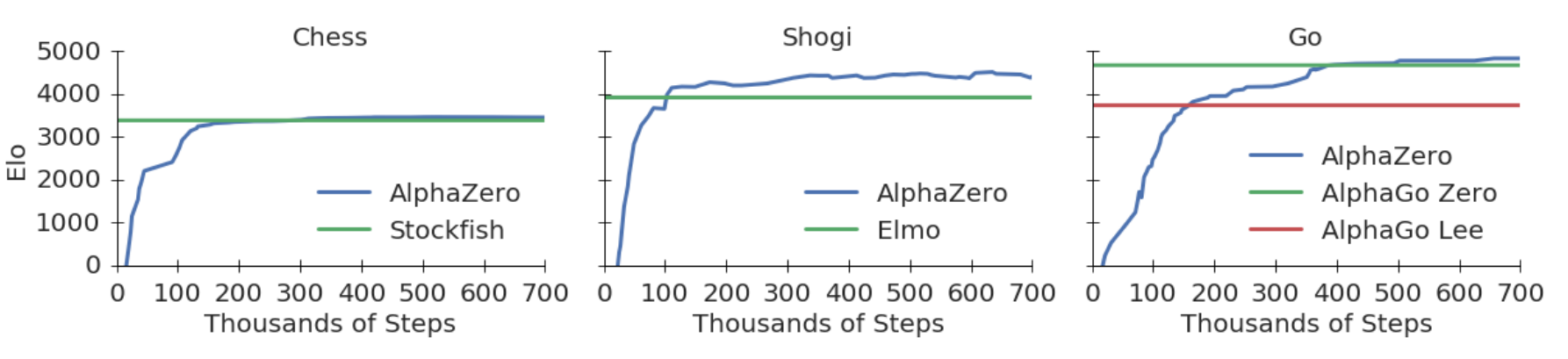
AlphaZero
AlphaZero is a more generalized and simple variant of the AlphaGo algorithm, and is capable of playing Chess, Shogi and Go.
- AlphaZero is a reinforcement learning system, it learns to play by playing games against itself and improving from its mistakes only
- Silver et al., 2017: "Mastering Chess and Shogi by Self-Play with a General Reinforcement Learning Algorithm"
- AlphaZero also outperformed Stockfish, one of the top-ranked chess engines, winning 28 games and drawing the rest in a 100-game match
Inside AlphaZero
- we have only one deep neural network for next move prediction and position evaluation
- it self-plays and simultaneously builds an MCTS tree
- it improves both the NN weights (via RL) and MCTS tree
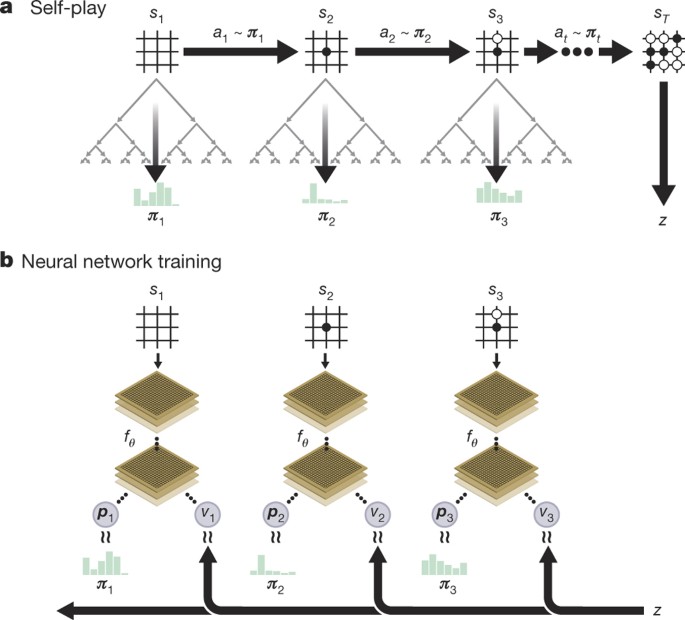
We minimize
$$ Loss = (z-v)^2 - \pi^T \cdot \log p + c \|\theta\|^2 $$where $p$ is a vector with moves probabilities from NN, $\pi$ — improved by MCTS vector of probabilities, $z \in \mathbb{R}$ and $v \in \mathbb{R}$ are value function estimations from MCTS and NN, $\theta$ are weights of NN, and $c$ is regularization coefficient
Summary
- We started with policy gradient descent (the central method in robotics)
- We got acquainted with the AlphaGo and AlphaZero models
- Reinforcement learning allows you to pass a gradient through a sequence of discrete steps with a reward at the end
- Best used in tasks where there is a discrete sequence of actions and states
What else can you look at?
- Educational resource on RL produced by OpenAI
- Intro to RL with David Silver, DeepMind × UCL, 2015
- Lecture by S. Nikolenko at Computer Science Club (in Russian)